



本田技研工業株式会社は、Hondaの研究開発子会社である株式会社本田技術研究所が、協調人工知能「Honda CI」を活用した「Honda CIマイクロモビリティ」の技術公開と実証実験開始を発表した。カメラベースで周辺環境を認識し、目的地まで自動走行を可能とする地図レス協調運転技術と、言葉や身振りを理解し、モビリティが自ら考え提案できる意図理解・コミュニケーション技術を搭載。技術実証実験では、搭乗型マイクロモビリティのCiKoMa(サイコマ)とマイクロモビリティロボットのWaPOCHI(ワポチ)が使用される。サイコマは1人~数人まで乗員可能で、無人自動走行している同車両を言葉で呼び寄せ、利用することができる。ビジネスや観光など、街中での気軽な移動手段となることを目的としている。ワポチは服や髪の毛の色、背格好などユーザーの特徴を画像で認識して記憶し、斜め後ろを追従する。上部に設置された複数のカメラを使用して360度立体的に捉え、他の歩行者の陰などに隠れてユーザーを見失っても探し出すことが可能だ。今後はユーザーの前を先導し歩きやすさをサポートする機能の実現を目指している。実証実験は、茨城県常総市内の複数エリアにて順次開始される。
人と分かり合える独自のAI、協調人工知能「Honda CI」を活用したCIマイクロモビリティ技術を公開
~茨城県常総市内の複数エリアにて技術実証実験を11月より順次開始~
●株式会社本田技術研究所は、人、機械、社会の共働/共生をサポートする独自のAI、協調人工知能「Honda CI」を活用した「Honda CIマイクロモビリティ」と活用技術を公開
●「Honda CIマイクロモビリティ」に搭載されるコア技術とその特徴
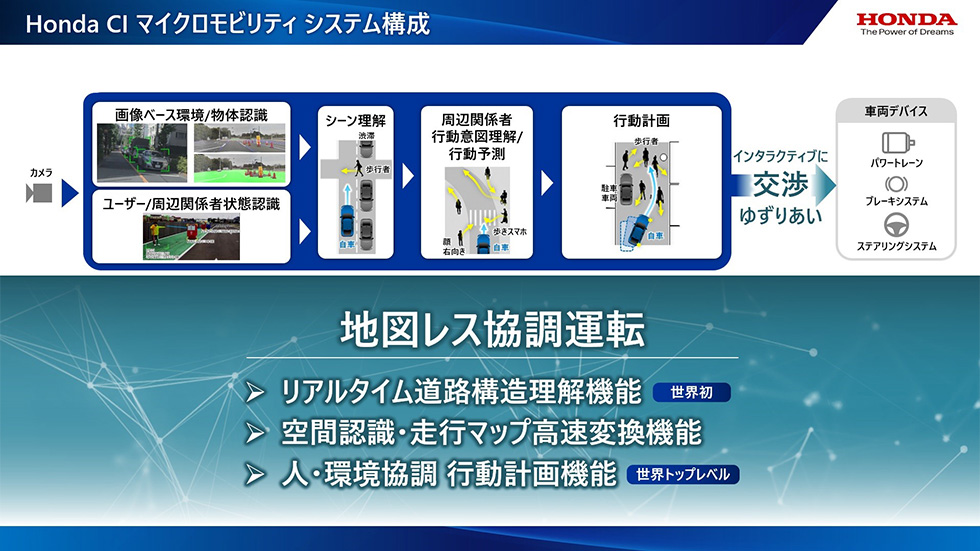
・地図レス協調運転技術
:高精度地図に頼らずカメラベースで周辺環境を認識し、目的地まで安全を維持しながら自動走行を可能とする技術
・意図理解・コミュニケーション技術
:人間のように言葉や身振りを理解し、モビリティが自ら考え、提案できるコミュニケーション技術
●技術実証実験で使用する「Honda CIマイクロモビリティ」
・1人~数人の乗員数を想定した搭乗型マイクロモビリティ:「CiKoMa(サイコマ)」
・ユーザーの特徴を記憶・認識し追従するマイクロモビリティロボット:「WaPOCHI(ワポチ)」
●これらの技術を用いた実証実験を、茨城県常総市内の「水海道あすなろの里(2022年11月より)」及び「アグリサイエンスバレー(2023年春より)」で順次開始
●順次技術実証実験エリアを拡大しながらCIマイクロモビリティ技術を進化させ、2030年ごろの実用化を目指し研究開発を行っていく
Hondaの研究開発子会社である株式会社本田技術研究所(本社:埼玉県和光市、代表取締役社長:大津 啓司、以下Honda)は、人と分かり合える独自の協調人工知能「Honda CI(Cooperative Intelligence)※1」を活用した「Honda CIマイクロモビリティ」と、搭載されるコア技術を公開しました。それらのCIマイクロモビリティを用いた技術実証実験を、茨城県常総市内の「水海道あすなろの里(2022年11月より)」及び「アグリサイエンスバレー(2023年春より)」で順次開始します。
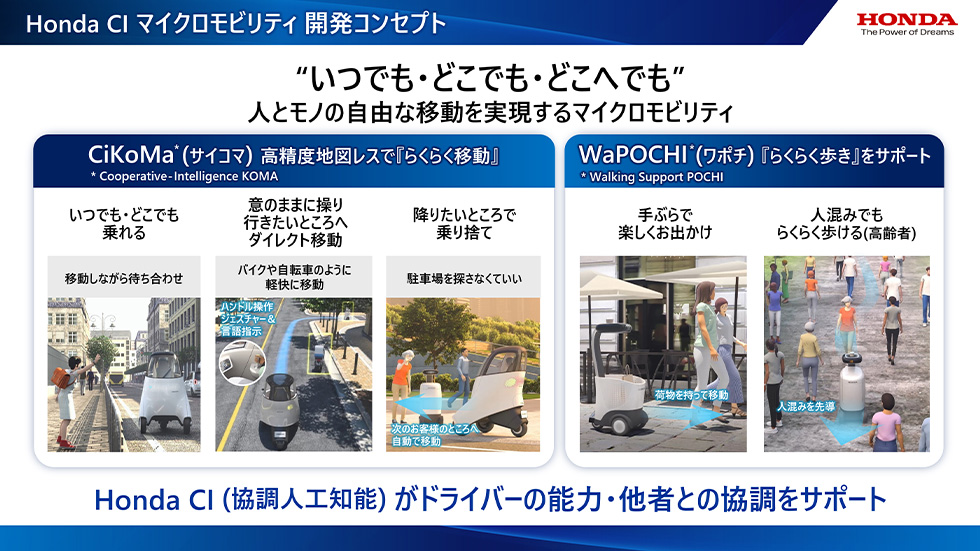
Hondaは、いつでも、どこでも、どこへでも、人とモノの移動を「交通事故ゼロ」・「ストレスフリー」で可能とし、「自由な移動の喜び」を一人ひとりが実感できる社会の実現を目指し、CIマイクロモビリティの技術開発に取り組んでいます。今後、少子高齢化やアフターコロナの社会において、ますますマイクロモビリティによる人とモノの自由な移動ニーズが増加することが予想される中、Hondaは今回、高精度地図に頼らず環境を認識しながらの自動走行を可能とする「地図レス協調運転技術」、人間のように対話やジェスチャーでコミュニケーションが可能な「意図理解・コミュニケーション技術」の2つのコア技術を確立しました。そして、それらの技術を活用した『搭乗型マイクロモビリティ:CiKoMa(サイコマ)』・『マイクロモビリティロボット:WaPOCHI(ワポチ)』を常総市内の複数エリアでの技術実証実験で使用し、リアル環境下での技術検証を行います。
今後は、常総市内の技術実証実験エリアを順次拡大しながら、2030年ごろの実用化を見据えCIマイクロモビリティの技術をさらに進化させることで、「移動と暮らしの進化」と「交通事故ゼロ」を両立する「Honda CIマイクロモビリティ」の実現を目指します。
- ※1振る舞いや言葉を通じてコミュニケーションを図り、ユーザー・周囲の人と協調しながらユーザー支える人工知能
CIマイクロモビリティ技術
地図レス協調運転技術:高精度地図に頼らずカメラベースで周辺環境を認識し、目的地まで安全を維持しながら自動走行を可能とする技術
1.リアルタイム道路構造理解機能(車道)
カメラからの画像情報だけ(=高精度地図レス)で交差点やカーブなどの環境、歩行者や車両などの他者を認識し、リアルタイムで走行可能領域を素早く理解・決定する機能
2.空間認識・走行マップ高速変換機能(公開空地※2)
車道のように区画線や縁石などがないオープンスペースにおいて、障害物の距離や物体構造を瞬時に立体化し、人間の目と同じように走行可能な領域を素早く認識しマップとして生成する機能
3.人・環境協調 行動計画機能
さまざまな走行環境を考慮したリアルタイムのルート最適化アルゴリズムを用い、目的地まで熟練ドライバーのように安心・スムーズに移動できるルートを決める機能
※2 車道や歩道からのアクセスが可能で、建物周辺や公園等の一般に開放され自由に通行または利用できる区域のこと
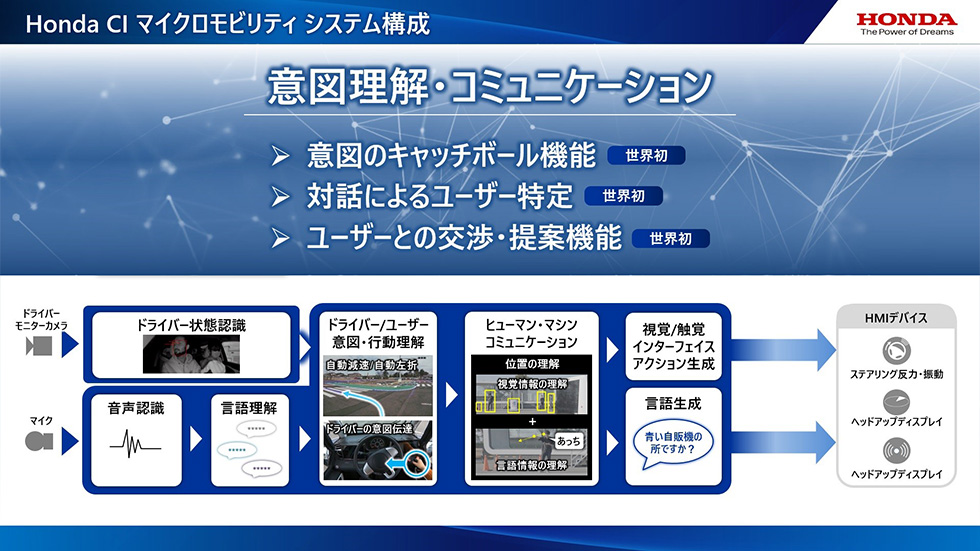
意図理解・コミュニケーション技術:人間のように言葉や身振りを理解し、モビリティが自ら考え、提案できるコミュニケーション技術
1.意図のキャッチボール機能
ユーザーとモビリティが互いに見えているものを言葉で伝え合い、人間同士のように自然なやり取りで、移動する位置を理解し合える機能
2.対話によるユーザー特定機能
複数のユーザー候補から特徴的な違いを判断し、人間のように対話でユーザーを特定できる機能
3.ユーザーとの交渉・提案機能
人間の経験を 「事前知識」 として登録することで、ルール・マナー・危険度などのネガティブ要素を避けるように交渉、提案するなど、人間のように周囲の状態を考慮して提案できる機能
Honda CIマイクロモビリティ
搭乗型マイクロモビリティ:CiKoMa(サイコマ)
1人~数人までの乗員数を想定した、いつでも・どこでも・どこへでも“意のまま”に移動できる搭乗型の電動マイクロモビリティ。ユーザーは言葉で呼び寄せることができ、無人自動走行で移動してきたCiKoMaに好きな位置を言葉やジェスチャーで指定して乗ることができます。走行中は「ジョイスティック」の操作で進路を指示することで、ドライバーの自由に進路を選ぶ意図と自動走行技術による協調運転が可能です。必要な時に呼んで乗車し、任意の場所で乗り捨てる利用を想定しており、自由に走らせることができるため、ビジネスや観光、街なかのちょっとした移動など、気軽な移動手段となることを目指しています。
マイクロモビリティロボット:WaPOCHI(ワポチ)
ユーザーの特徴を記憶・認識し、人混みの中でもユーザーに追従し続ける電動マイクロモビリティロボット。手のひら静脈認証で特定したユーザーの服や髪の毛の色、背格好などの特徴を画像で認識して記憶。ユーザーの斜め後ろを、荷物を載せながらペットのようについていきます。認識は上部に設置された複数のカメラを使用して360度立体的に捉え、AIでユーザーの特徴を抽出しトラッキングします。追従中に他の歩行者の陰などに隠れてユーザーを見失っても、記憶した特徴から探し出し、追従に戻ることが可能。さらに今後は、ユーザーの前を先導し歩きやすさをサポートする機能の実現も目指し、研究を続けています。
常総市との技術実証実験概要
水海道あすなろの里
2022年11月より、CiKoMaの4人乗りモデルを活用し、パーク内でAIによる走路認識が困難な白線や明瞭な境界のない走路に対応するため、地図レス協調運転技術の進化に取り組みます。実験開始当初は、グリーンスローモビリティ(ドライバー運転)と安全運転支援の組み合わせからスタートし、その後、地図レス協調運転技術の進化に合わせ、自動走行へ移行する計画です。
アグリサイエンスバレー
2023年春より、CiKoMaの4人乗りモデル及び、WaPOCHIを活用し、地図レス協調運転技術と意図理解・コミュニケーション技術を用いた自動走行技術やユーザー追従走行技術の検証に取り組みます。CiKoMaの実験開始当初は、安全監視員が同乗する自動走行からスタートし、その後、無人自動走行の実現を目指します。WaPOCHIは、販売スタッフをユーザーとする追従走行試験からスタートし、その後、一般ユーザーの買い物などでの試験利用を予定しています。

リリース提供元:本田技研工業株式会社

